武漢博奧思精密自動化有限公司
公司地址:武漢市蔡甸區大集街星光大道79號聯東U谷創新企業港1棟1單元
市 場 部:汪經理 13886171713
人 事 部:027-69573069
傳 真:N/A
郵 箱:sales@boaosi.com.cn
|
川崎機器人革新突破——雙腕duAro 實現了真正的人機協作。 節省空間 設置在同一軸上的2個手臂可由1臺控制柜控制,且其安裝空間僅為1個人所需空間。同軸雙手臂的構造不僅實現了雙手臂作業,也實現了2臺定位機器人無法做到的2個手臂相互協調、共同完成作業的可能。 設置簡便 控制柜放置于設置手臂的臺車內,通過移動臺車即可簡單的完成機器人的設置工作。 與人員的協同作業 選用低輸出馬達、并且通過區域監視實現的減速機能等,使得其與人員間的協同作業得以實現。除此之外,一旦機器人與作業人員發生碰撞可能,也會通過其配置的沖突檢測功能瞬間停止機器人運行。 * 請實施風險評估、在充分降低風險的基礎上進行使用。 簡易示教 可通過操作人員手持機械手臂進行直接動作示教實現簡易示教作業機能。 選件豐富 T/P示教器即觸摸操作面板可與多臺機器人進行連接。另外,還有視覺系統及抓手選件可供選擇。 |
|||
 |
 |
 |
 |
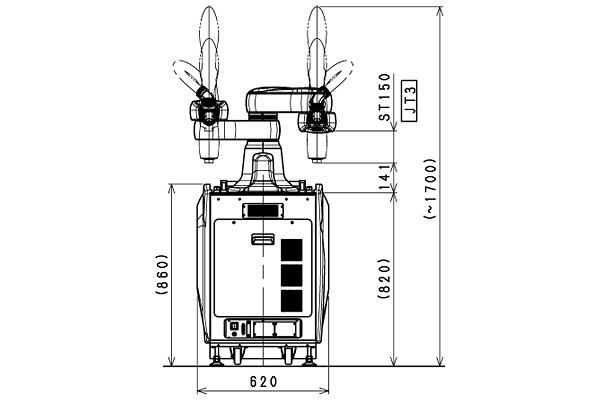
| 手臂形式 | 水平多關節 | |||
| 動作自由度(軸) | 4*2手臂 | |||
| 最大可搬重量(kg) | 2(1手臂) | |||
| 重復定位精度(mm) | +/-0.05 | |||
| 最大行程 | 下手臂 | 上手臂 | ||
| 腕旋轉(°) | -170至+170(JT1) | -510至+150(JT5) | ||
| 腕旋轉(°) | -140至+140(JT2) | -140至+140(JT6) | ||
| 腕上下(mm) | 0至+150(JT3)*1 | 0至+150(JT7)*1 | ||
| 手腕回轉(°) | -360至+360(JT4)*1 | -360至+360(JT8)*1 | ||
| 控制柜部分(D61) | 控制軸數(軸) | 最大12 | ||
| 驅動方式 | 全數字伺服系統 | |||
| 動作方式 | 示教模式 | 各軸獨立、基礎坐標系、工具坐標系 | ||
| 再現模式 | 各軸插補、直線插補 | |||
| 示教方式 | AS語言方式、直接示教 | |||
| 存儲容量(MB) | 4 | |||
| I/O信號 | 通用輸入(點) | NPN規格:12(最大28)/NPN規格:6(最大16)/Cubis-S規格:6(最大16)*2 | ||
| 通用輸出(點) | NPN規格:4(最大12)/NPN規格:10(最大24)/Cubis-S規格:0(最大14)*2 | |||
| 電源規格 | AC200-240V、50/60HZ+/-2%、單相、最大2.0kVA | |||
| D種接地線(機器人專用接地)、最大漏電電流10mA以下 | ||||
| 本體重量(kg) | 約200 | |||
| 安裝方式 | 地面式 | |||
| 安裝環境 | 環境溫度(℃) | 5-40 | ||
| 相對濕度(%) | 35-85(無結露) | |||
Copyright 2013-2017 武漢博奧思精密自動化有限公司 鄂ICP備18011408號-1 鄂公安網備 42011402000660號
